LABORAS – ?????? ???????, ??????? ????????? ?????????????? ?????????? ????????? ????????? ?????????? ????????, ??? ????? ? ????. ? ??????? ?? ?????? ?????? ??????, ???????? ??????????? ???????? ????? ? ????? ?????????????, LABORAS ?? ?????? ???????????? ?????? ?????????? ?? ????????? ??????? ?????????, ?? ????? ???????????? ????????????? ???????? ?????????? ?????????. ?????? ??? ?????????? ?????????????? ??????????? ???? ??? ??????????? ????????? ???????????? ????????? ???????, ????? ??????????????? ? ??????????? ??? ??, ??????? ????? ???? ?????????? ????????????? ???????????? ??? ??????? ??????????????????? ?????????.

LABORAS ??????? ?? ??????? ??????? ???????? ? ????, ??????? ????????? ?????????? ????????? ? ??????? ?????????. ????? ?????????? ??????????? ????????????? ??????, ??????? ????? ??????? ?????????? ? ????????????? ????????????, ???? ??????????? ?????????? ??????????¬???????? ????????, ??????????? ? ???????????? ???????????. ?????? ??????? – ????????????? ?????????, ??????? ??????????????? ???????? ????????? ? ????????????? ???????. ?????? ? ???????? ???????? ? ?????????? ? ????????????? ??????? ?? ????????????? ?????????. ????????? ??????????? ????? ??????? ??:
????????, ?????????? ????????? ?????????, ?????????? ?????????-??????????? ????????????? ????????? ? ?????????? ? ???????? ????, ??????? ????????? ????? ????????. ??????????????? ???? ????????? ? ??????????????? ?????????? (? ???????? ???????????? ???????), ??????? ?????????? ?? ????????? ?????????.
 ?????????? ????????? ? ?????????? ???????????????? ????????? ???????????????? ? ???????? ?? ???? ????????????? ????????? ?????????? ????????????? ???????. ????? ????????? ??????? ? ?????????? ????? ??????? ?????? ????????? ??????????, ??? ????????????? ???????????? ???????? ? ?????????? ??????????? ???????????? ??????????, ????????? ??????? ???????????? ??????????. ??????????????? ????????? ????? ???????????? ?????????? ?????????? ????????. ?????????? ????????? ? ?????????? ???????????????? ????????? ???????????????? ? ???????? ?? ???? ????????????? ????????? ?????????? ????????????? ???????. ????? ????????? ??????? ? ?????????? ????? ??????? ?????? ????????? ??????????, ??? ????????????? ???????????? ???????? ? ?????????? ??????????? ???????????? ??????????, ????????? ??????? ???????????? ??????????. ??????????????? ????????? ????? ???????????? ?????????? ?????????? ????????. |
 ???????? ??????? ?????????? ?????????? ? ????? ?????????? (LCU) LABORAS, ??????? ??????????????? ?????????? ??????? ? ???????? ??????. ???? ?????????? LABORAS ????? ???????????? ??????? ?????? ?? ?????? ????????????? ????????. LCU ???????? ?????? ?? ???????????????? ????? ?? PC ??? ?????????? ?????????. ???????? ??????? ?????????? ?????????? ? ????? ?????????? (LCU) LABORAS, ??????? ??????????????? ?????????? ??????? ? ???????? ??????. ???? ?????????? LABORAS ????? ???????????? ??????? ?????? ?? ?????? ????????????? ????????. LCU ???????? ?????? ?? ???????????????? ????? ?? PC ??? ?????????? ?????????. |
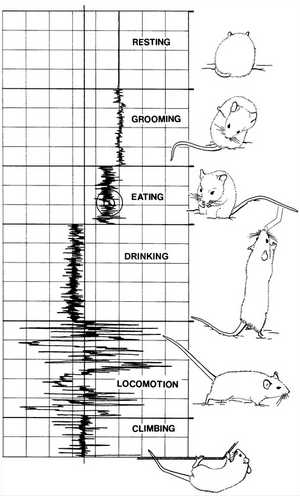
????????? ???????????? ???????? ???????? ???????? ?????? ???????????? ???????????. ????????? LABORAS ?????????? ????? ????????? ?????????? ????????????? ??????? ? ??????? ???????, ????? ??????? ???????????? ??? ????????? ???? ? ?????. ?????? ????????? ????? ???????????? ????? ???????, ??????? ?????????????? ?????????? LABORAS ??? ????????????? ?????????.. ?? ??????????? ????? ???????? ????? ????????? ???????? ??? ????????????, ???????? ?????, ?????. ? ?????????? ? ??????????, ???????????? LABORAS, ????????? ???????? ??????? ?? ???????? ? ??????????????? ??????? ????????? ? ?????? ????????? ?????? ????????????? ??????? ????????, ????????????? ??????? ? ???????? ????????? ?? ? ?????? ??????? ???????.
???????????? LABORAS ??? ??????? ????????? ??????? ? ?????????? ??????????, ??????? ???????? ?? ??????? ????????.
????????????? (????????????, ??????? ???????? ??? ????????????):
???????? ????? ????????????? ???????? ? ??????? ????? ?? ?????? ?? ?????????.